At the start of our design process, the team broke down the MCBD into three components: the outer spherical wheel, the driving yoke, and an internal structure to maintain magnetic coupling between the wheel and the yoke. We then generated several subsystems concepts and produced design concepts from various combinations of the subsystem concepts.
| Drive System | Spherical Wheel | Internal Structure |
|---|---|---|
| Omni-wheels | Banded wheel | Fully spherical |
| Magnetic omni-wheels | Rigid wheel with outer tire | Top hemisphere |
| Omni-chains | Flexible sphere | Bottom hemisphere |
| Magnetic omni-chains | Paneled sphere | Top/bottom hybrid |
| Induction sphere | Inflatable sphere | Top 3/4 sphere |
| Internal omni-wheels | Threaded hemispheres | Foldable top/bottom hybrid |
| Press-fit hemispheres | Bottom weighted | |
| Locking hemispheres | Left/right hybrid |
After we generated our concepts, we screened all of them against last year's final design based on the metrics we created earlier. Then, we determined weighted scores for each of the top 3 design concepts to select our final design concept.
| Selection Criteria | Weight | Twist & Lock | Bottom Omni-wheels | Induced Omni-wheels |
|---|---|---|---|---|
| Yoke diameter | 3 | 5 | 5 | 3 |
| Spherical wheel diameter | 5 | 5 | 5 | 5 |
| Load carrying capacity | 4 | 3 | 3 | 3 |
| Magnetic coupling force | 5 | 4 | 4 | 5 |
| Distance from center of gravity to floor | 3 | 2 | 3 | 4 |
| Assembly/disassembly time | 3 | 5 | 5 | 5 |
| Overall weight | 1 | 3 | 4 | 2 |
| Rotational inertia of spherical wheel | 2 | 3 | 4 | 2 |
| Maximum actuation speed | 4 | 4 | 4 | 3 |
| Magnetic field strength outside ball drive | 5 | 3 | 3 | 5 |
| Time between maintenance | 5 | 4 | 4 | 5 |
| Power efficiency | 4 | 3 | 3 | 2 |
| Maximum traversable incline | 5 | 3 | 3 | 3 |
| Maximum traversable obstacle height | 4 | 2 | 3 | 4 |
| Maximum actuation acceleration | 4 | 3 | 3 | 2 |
| Cost | 2 | 4 | 3 | 4 |
| Number of major components | 1 | 4 | 4 | 5 |
| Coefficient of friction with floor | 3 | 5 | 5 | 5 |
| Weighted Scores | 227 | 235 | 241 | |
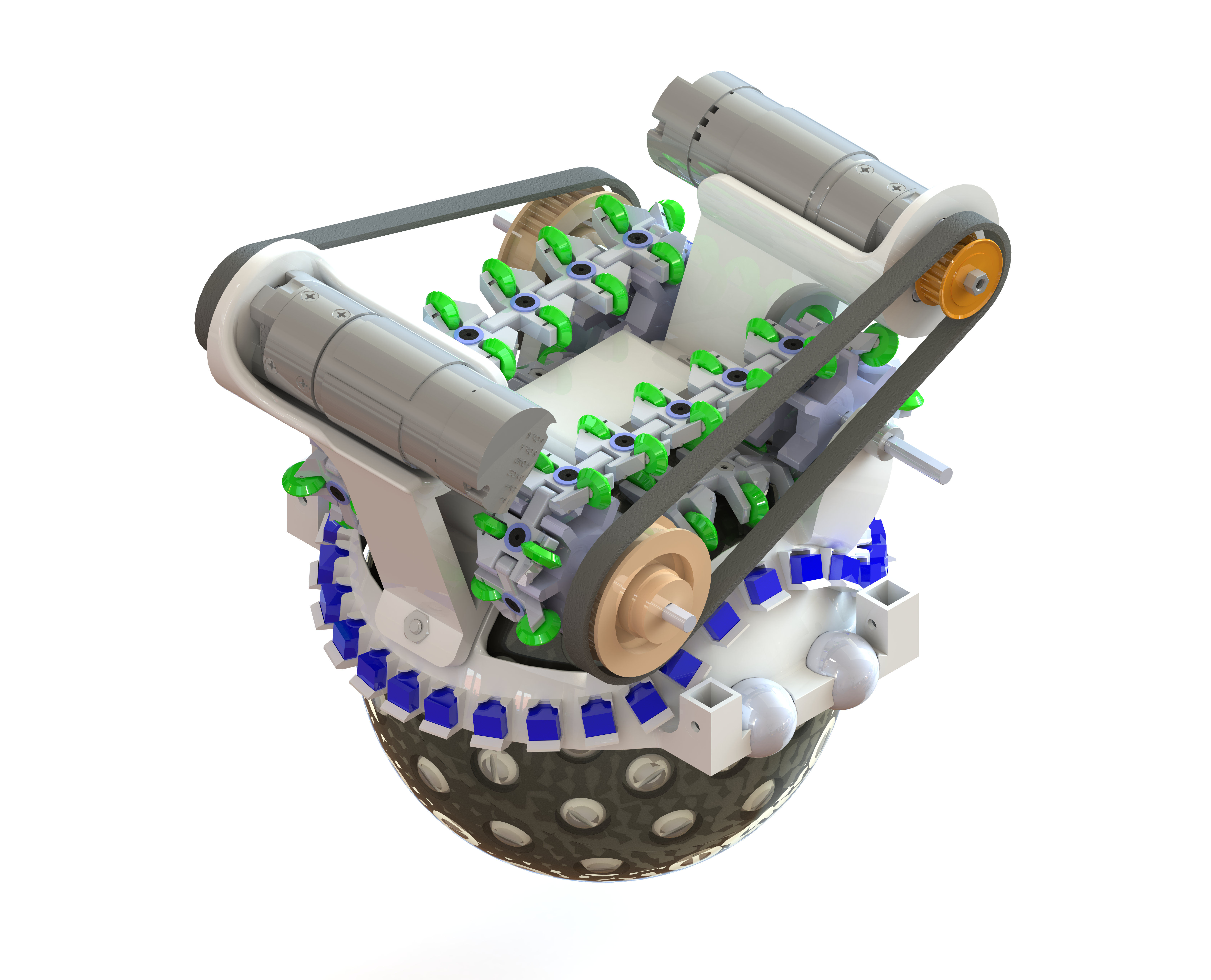
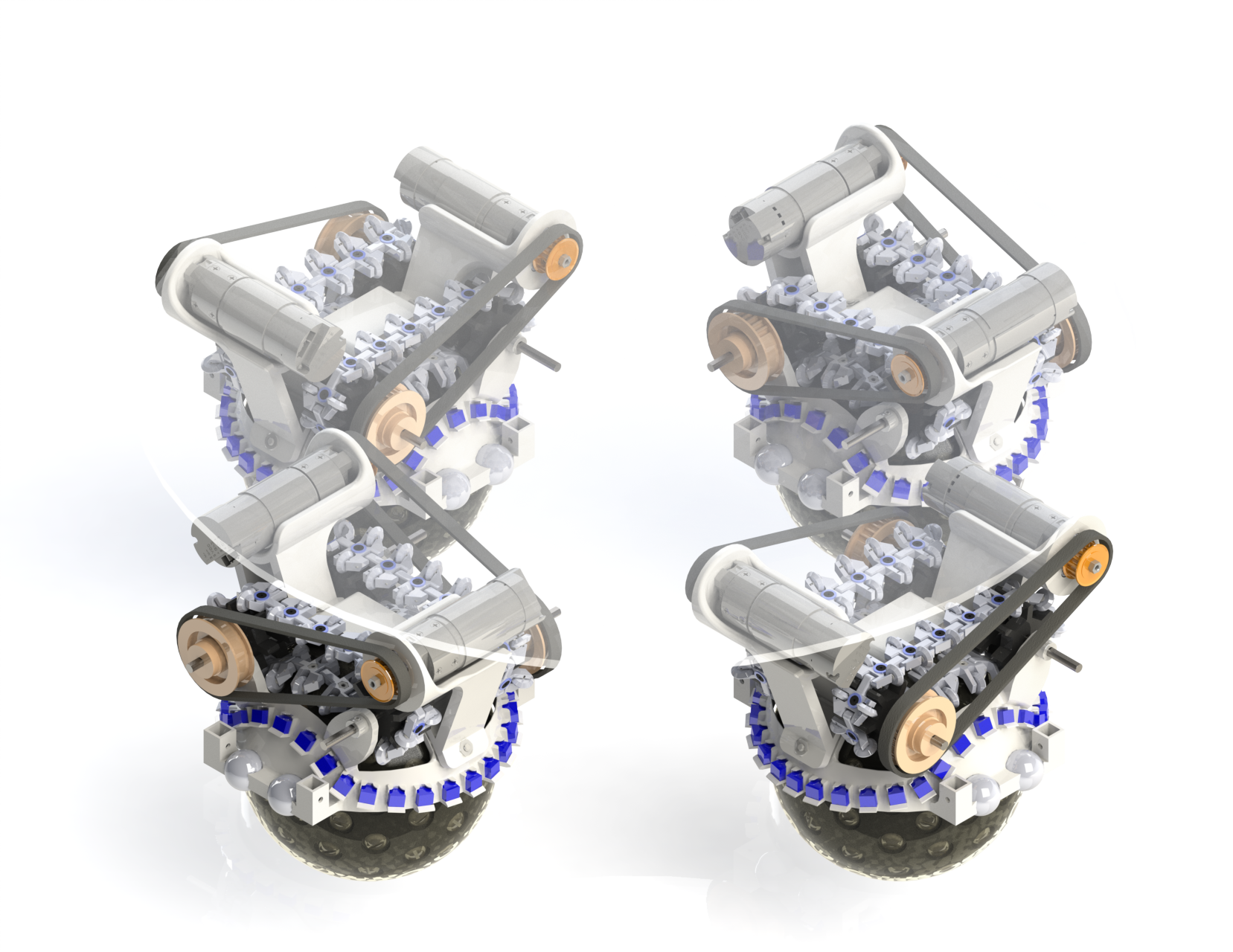
Our final design eliminated the need for an internal structure by adding steel parts to the spherical wheel itself. We determined that for our intended use, each ball module would only need to actuate in one direction, as we expect them to be implemented in groups of three or four, although our team will only be assembling one ball drive for our beta prototype. Holonomic motion and rotational motion can be achieved by installing multiple modules as shown below. However, each module will have two omni-chains, to help center the spherical wheel within the yoke and allow for more consistent control.
The final spherical wheel design is two thick-walled, bolt-filled, thermoplastic polyurethane hemispheres that are held together by some of the steel screws. The hemispheres are be 1-inch thick, as determined by a static load analysis performed in Solidworks. The bolts threaded through the wheel act as coupling components with the yoke. An outer coating of SmoothOn rubber is applied to the outer surface of the wheel after assembly to increase the ball drive's traction on the ground. The coating adds relatively little mass to the wheel.
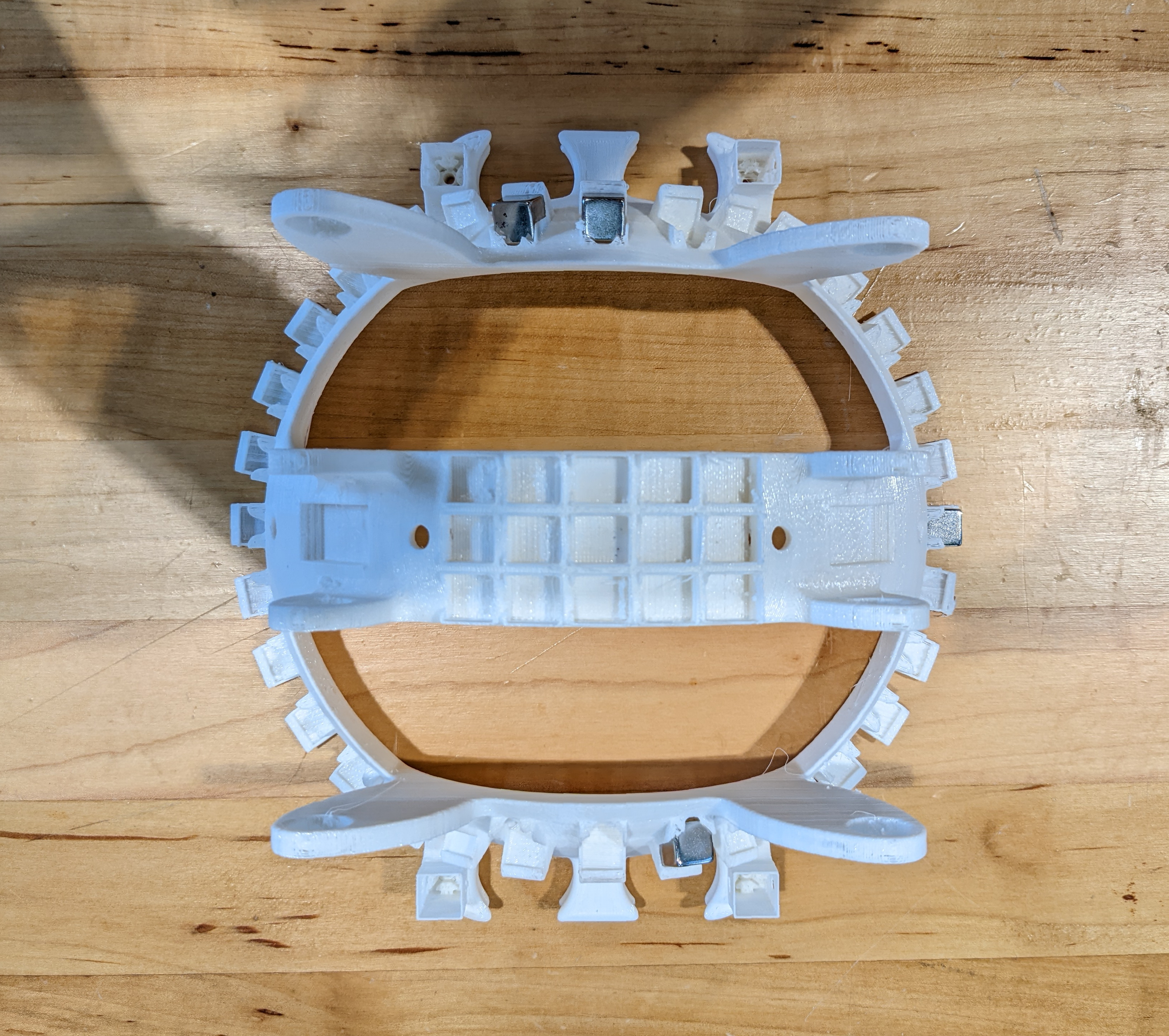
After conducting a magnetic field calculation, the team determined that mounting disc magnets to the omni-chains would be insufficient to maintain coupling within the ball drive. To compensate for this, the team has added additional magnets along the perimeter and top of the yoke. The top enclosures for the magnets are a simple array that will allow the team to rearrange magnets freely without needing to refabricate the yoke. Although the magnets are strong, the snap-fit geometry added to the enclosures holds them securely on the yoke.
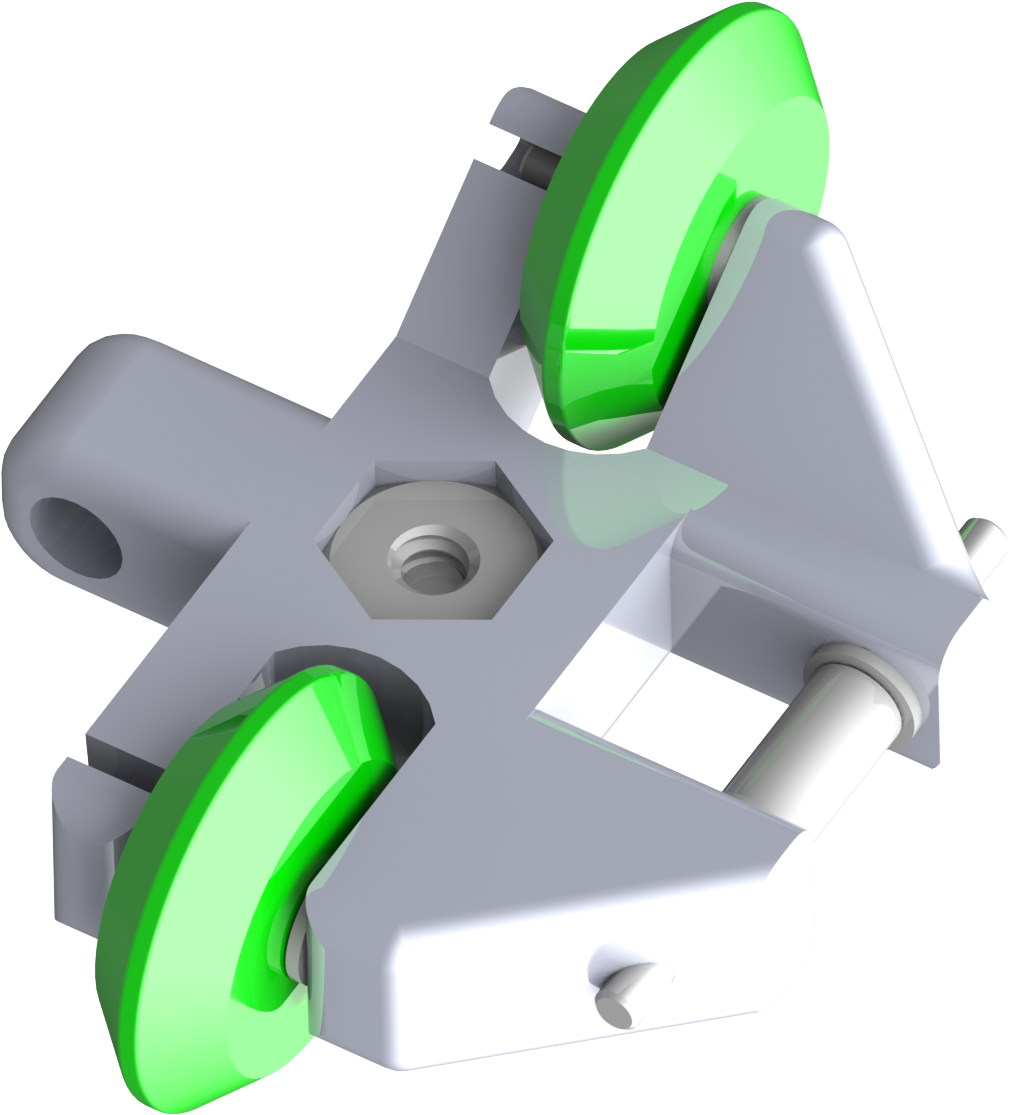
With the addition of a second omni-chain, the team investigated the contact between the chains and the spherical wheel. We found that a flat omni-link would not have enough surface contact with the wheel, so the omni-chain links have been changed to more closely match the surface of the spherical wheel. Additionally, the shape of the omni-chain link has been altered to allow for a sprocket to drive the omni-chains.